DMS + YOLO 融合:驾驶员分心检测与道路目标识别一体化框架
前言
驾驶员分心检测(DMS)和道路目标识别通常是独立研究的领域。Nature Scientific Reports 2025年7月发表的一篇论文,提出了集成深度学习框架,同时检测驾驶员分心和道路目标,实现实时风险评估。
核心创新:
- CNN 检测三种分心类型:视觉、手动、认知
- YOLO 实时检测道路目标
- 注意力机制融合 + 风险评估模块
- 边缘设备部署优化(25 FPS)
一、研究背景
问题现状
| 现有方案 | 局限性 |
|---|---|
| 单独 DMS | 只关注驾驶员状态,忽略环境风险 |
| 单独 ADAS | 只关注道路目标,忽略驾驶员状态 |
| 缺乏融合 | 无法评估综合风险 |
研究目标
一体化框架:
1 | |
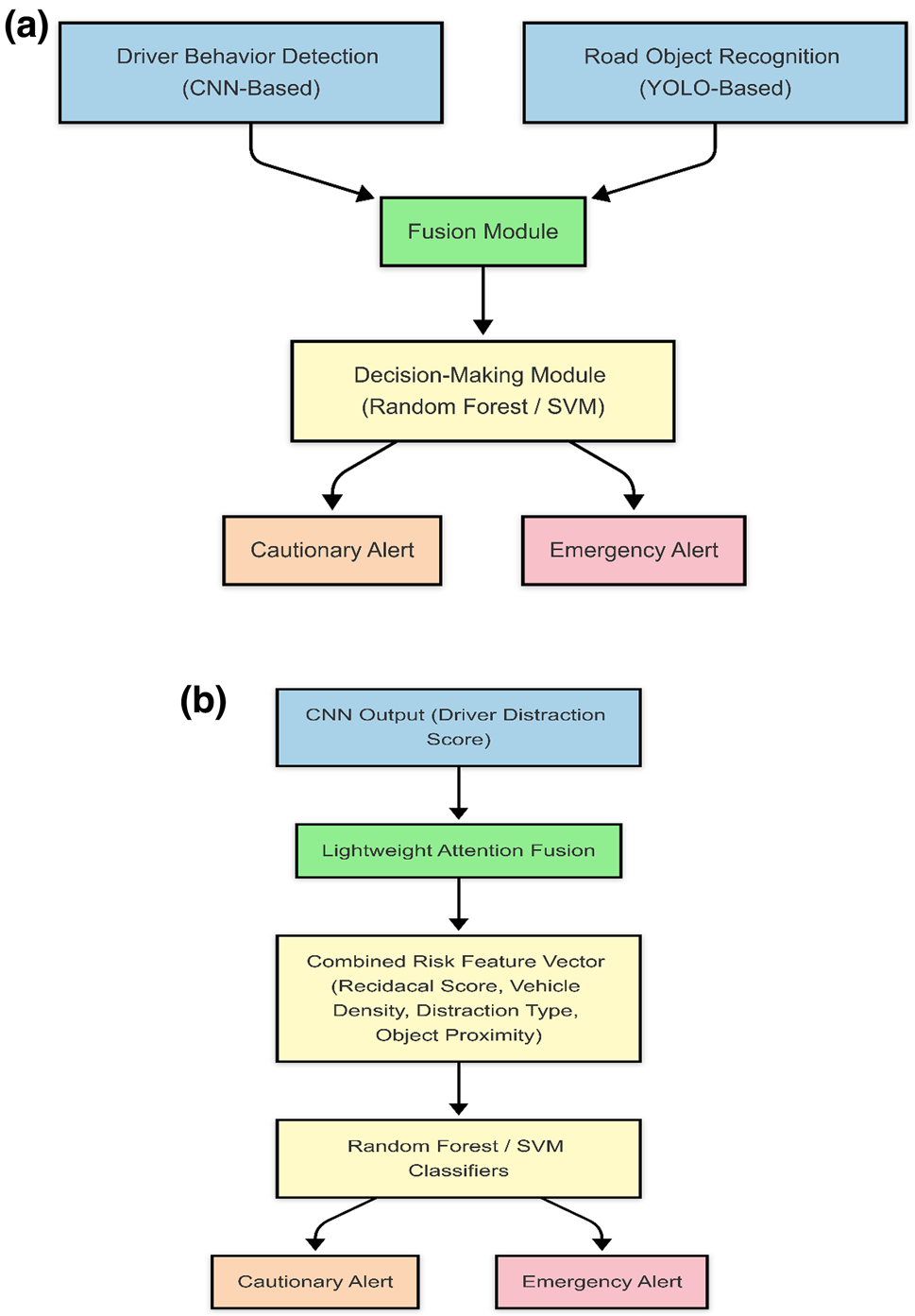
图1:系统整体工作流程
二、核心技术
2.1 驾驶员分心检测(CNN)
分心类型分类:
| 类型 | 定义 | 检测特征 |
|---|---|---|
| 视觉分心 | 眼睛偏离道路 | 头部姿态、视线方向 |
| 手动分心 | 手离开方向盘 | 手部位置、动作识别 |
| 认知分心 | “看但没看见” | 眼动行为、时空特征融合 |
技术方案:
- 基础模型:VGG-16、ResNet(ImageNet 预训练)
- 迁移学习:微调最后几层
- 输出:分心类型 + 置信度
图2:基于迁移学习的 CNN 分心检测架构
性能:
- F1-score:94.3%
- 超越 E2DR 模型(92.5%)
2.2 道路目标检测(YOLO)
检测目标:
- 车辆
- 行人
- 交通标志
- 车道线
技术方案:
- 模型:YOLOv4
- 训练数据:MS COCO + KITTI
- 恶劣环境增强:雨、雾、夜间
图3:YOLO 目标检测微调流程
性能:
- mAP:89.7%
- 恶劣环境下降仅 3%(YOLOv3 下降 7%)
2.3 注意力融合机制
风险评分公式:
1 | |
风险分级:
| 风险等级 | 条件 | 响应 |
|---|---|---|
| Safe | R < 0.3 | 无预警 |
| Caution | 0.3 ≤ R ≤ 0.7 | 警告 |
| Critical | R > 0.7 | 紧急预警 |
2.4 学习型决策模块
分类器:
- Random Forest:稳定多场景分类
- SVM:边界决策优化
输入特征:
1 | |
三、实验结果
3.1 数据集
| 任务 | 数据集 | 内容 |
|---|---|---|
| 分心检测 | State Farm Distracted Driver | 10 类行为,标注图像 |
| 目标检测 | MS COCO + KITTI | 车辆、行人、标志等 |
3.2 性能对比
| 系统 | 准确率 | F1-score |
|---|---|---|
| 集成系统(本文) | 91.5% | 94.3% |
| CMFT | 88.3% | - |
| E2DR | - | 92.5% |
| 单独 CNN | 85.2% | - |
| 单独 YOLO | 87.1% | - |
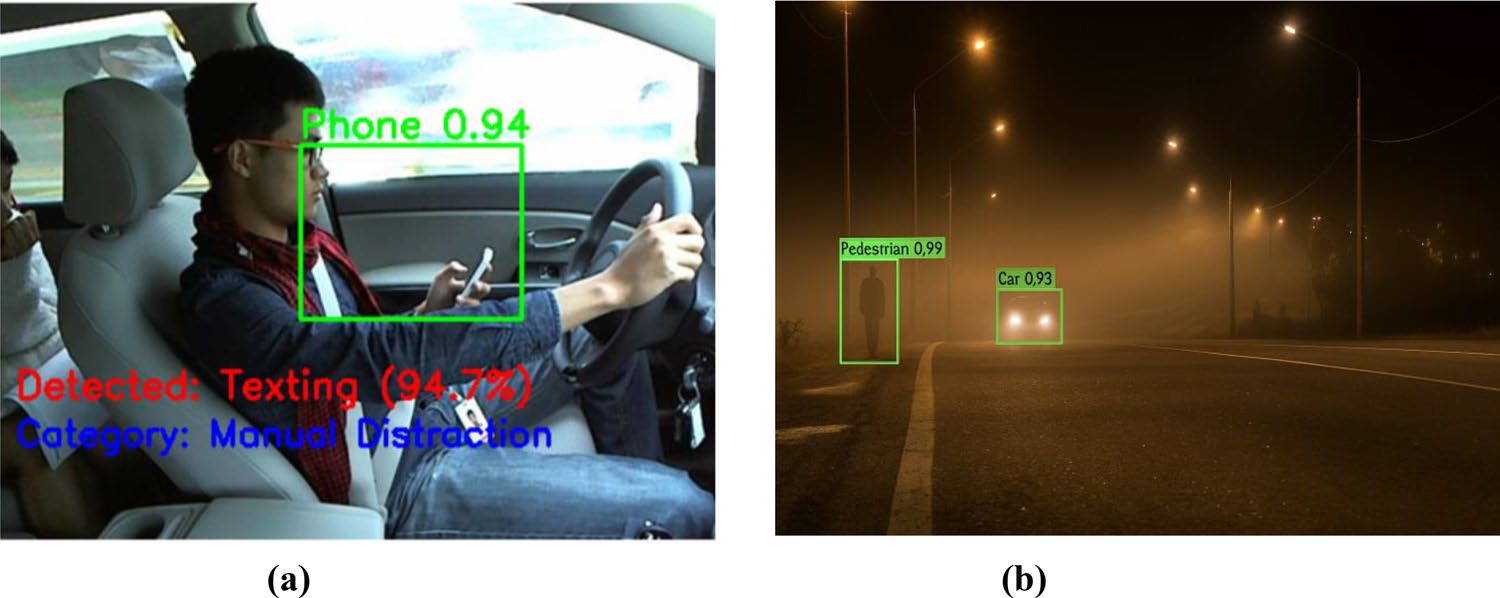
图4:驾驶员分心检测与道路目标识别结果示例
3.3 边缘设备部署
平台: NVIDIA Jetson Xavier NX
优化: TensorRT INT8 量化
| 指标 | 优化前 | 优化后 |
|---|---|---|
| 推理延迟 | 120 ms | 39 ms |
| 帧率 | 8 FPS | 25 FPS |
| 端到端延迟 | 180 ms | 57 ms |
| 模型大小 | 100% | 55% |
| 内存占用 | 100% | 54% |
四、关键技术细节
4.1 数据增强
恶劣环境模拟:
- 亮度抖动 + 高斯噪声 → 夜间场景
- 模糊核 + 遮挡 → 雾天场景
- 仿射变换 + 随机裁剪 → 提升泛化
4.2 损失函数
CNN 分类损失:
1 | |
YOLO 检测损失:
1 | |
4.3 风险评估逻辑
预警决策:
1 | |
五、对 IMS 的启示
5.1 可直接借鉴
| 技术 | IMS 应用场景 |
|---|---|
| 认知分心检测 | 解决”看但没看见”场景 |
| 融合风险评估 | DMS + ADAS 联合预警 |
| 注意力机制 | 动态权重分配 |
| 边缘部署优化 | 高通 8295/8775 平台 |
5.2 关键突破点
认知分心检测(IMS 难点):
| 传统方法 | 本论文方法 |
|---|---|
| 基于视线落点 | 眼动行为 + 时空特征融合 |
| 静态阈值 | 动态风险评估 |
| 单一特征 | 多特征融合 |
技术路径:
1 | |
5.3 实施建议
短期(1-2 月):
- 评估 YOLOv4 在 IMS 场景的性能
- 测试 ResNet/VGG 迁移学习效果
中期(3-6 月):
- 开发认知分心检测原型
- 建立融合风险评估模块
长期(6-12 月):
- 高通平台部署优化
- 与 ADAS 系统联调
六、Euro NCAP 2026 要求
根据论文和最新标准,Euro NCAP 2026 对 DMS/OMS 的要求:
6.1 DMS 要求
| 功能 | 要求 |
|---|---|
| 疲劳检测 | 必须支持 |
| 分心检测 | 2026 强制 |
| 视线追踪 | 必须支持 |
| 报警时间 | 实时响应 |
6.2 CPD 要求(儿童检测)
| 项目 | 要求 |
|---|---|
| 检测范围 | 所有座位(6 岁以下儿童) |
| 检测方式 | 直接检测(运动/呼吸/心跳) |
| 预警时间 | 锁车后 15 秒内 |
| 干预措施 | 空调启动、车门解锁、远程通知 |
七、总结
核心贡献
- 一体化框架:CNN + YOLO 融合,同时检测驾驶员状态和道路风险
- 认知分心检测:解决”看但没看见”难题
- 实时性能:25 FPS,边缘设备可部署
- 高准确率:F1-score 94.3%,系统准确率 91.5%
对 IMS 的价值
| 维度 | 价值 |
|---|---|
| 技术创新 | 认知分心检测突破 |
| 产品竞争力 | DMS + ADAS 融合 |
| 法规合规 | 满足 Euro NCAP 2026 |
| 降本增效 | 边缘部署,降低硬件需求 |
论文来源: Scientific Reports, Nature (July 2025)
DOI: 10.1038/s41598-025-08475-4
数据集: State Farm Distracted Driver, MS COCO, KITTI
代码: 论文未开源,可参考架构复现
解析日期: 2026-03-09
相关论文:
- SynAD:合成数据增强自动驾驶
- SMPLest-X:人体姿态估计基础模型
DMS + YOLO 融合:驾驶员分心检测与道路目标识别一体化框架
https://dapalm.com/2026/03/09/DMS-YOLO融合驾驶员分心检测与道路目标识别/